





Devicenet从站板卡安装于总线母板卡1TJ上。
位置位于1TJ的上侧。
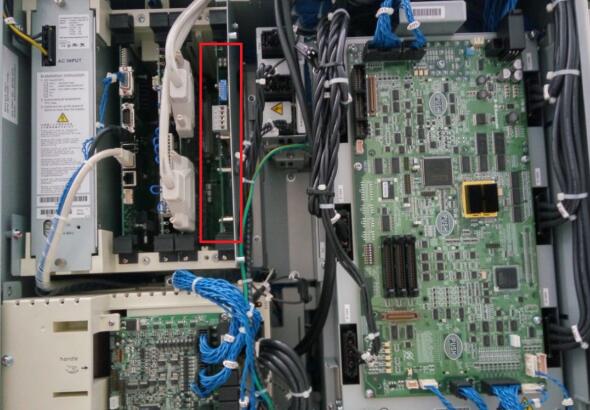
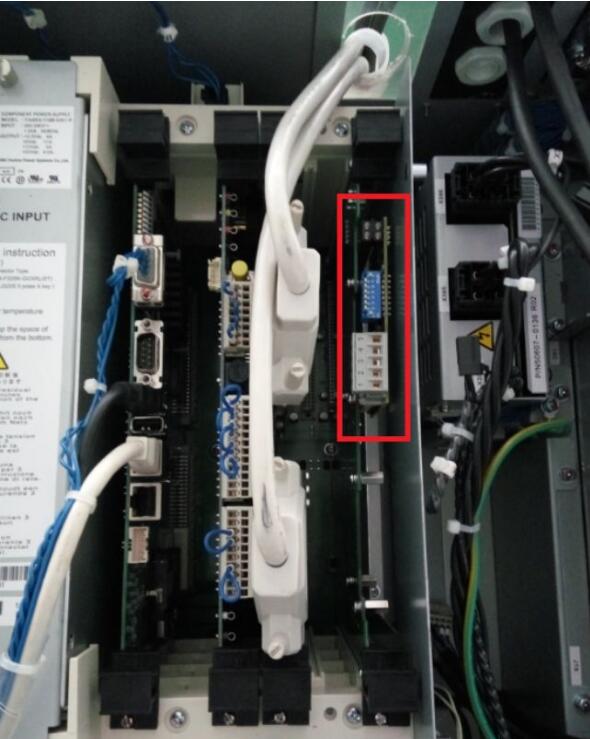
总线母板插入到空余插槽位置即可
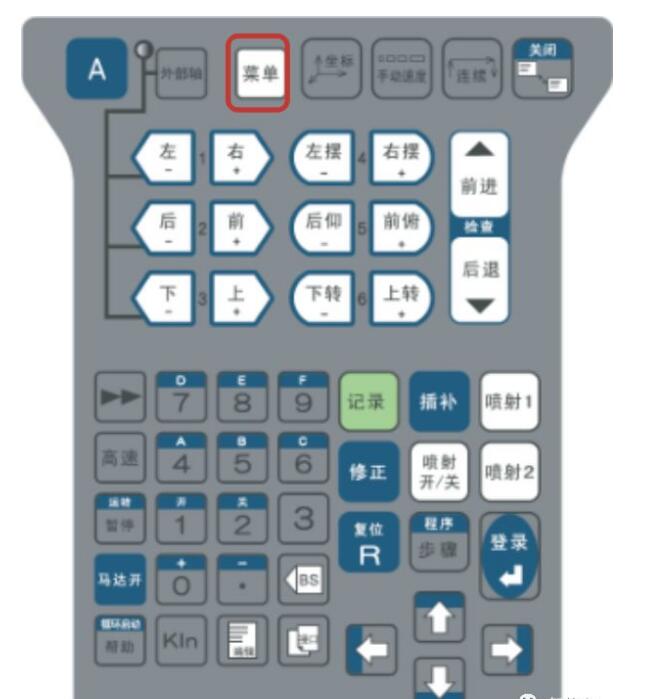
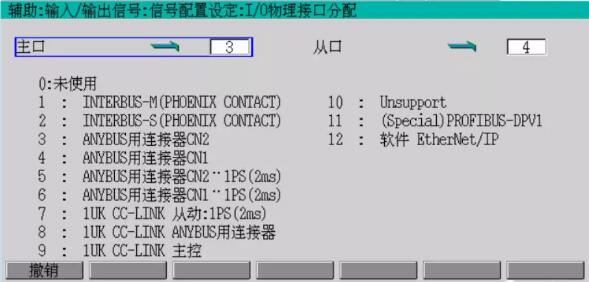
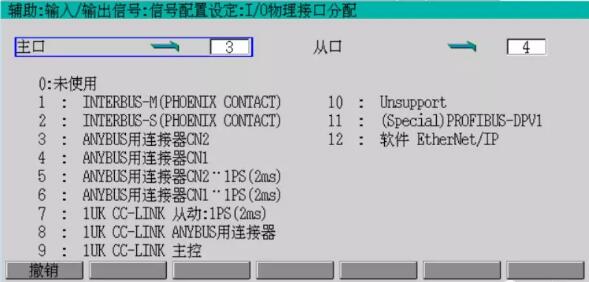
点击示教器键盘上的「菜单」按键,进入辅助功能=>6.输入/输出信号=>8.信号配置设定=>2.I/O物理接口分配菜单,填入IO物理接口分配。
在安装对应板卡的情况下,填入对应的端口号。
主口填入3,从口填入4。
不使用的情况下填0。
点击示教器键盘上的「菜单」按键,进入辅助功能=>6.输入/输出信号=>8.信号配置设定=>2.I/O物理接口分配菜单,填入IO物理接口分配。
在安装对应板卡的情况下,填入对应的端口号。
主口填入3,从口填入4。
不使用的情况下填0。
进入辅助=>6.输入/输出信号=>11.I/O信号数设定菜单
I/O信号数设定中设定总线的信号数
外部输入/输出信号数根据1TW板卡的数量来决定。1块板卡自带32位输入,32位输出(标配)。
主/从信号数则代表着主站和从站需要设定的信号的位数。(*多960个)
以主从各32位为例如下图:
进入辅助=>6.输入/输出信号=>11.I/O信号数设定菜单
I/O信号数设定中设定总线的信号数
外部输入/输出信号数根据1TW板卡的数量来决定。1块板卡自带32位输入,32位输出(标配)。
主/从信号数则代表着主站和从站需要设定的信号的位数。(*多960个)
需要其他特殊设定的总线部分-DeviceNet主站设定
进入辅助=>6.输入/输出信号=>8.信号配置设定=>6.设定设备网络=>1.扫描仪设定菜单
扫描周期,轮询比率和*时时间。
如无特殊要求请不要随意修改。
(修改不当会导致通讯中断)

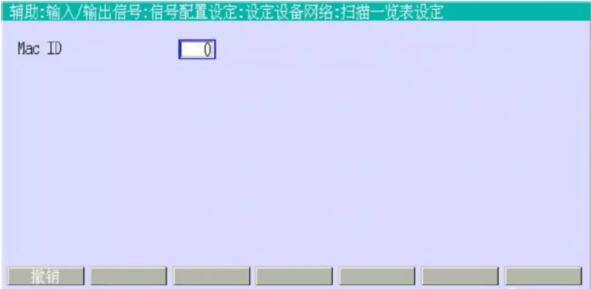
进入辅助=>6.输入/输出信号=>8.信号配置设定=>6.设定设备网络=>2.扫描一览表设定菜单
设定从站站号
进入辅助=>6.输入/输出信号=>8.信号配置设定=>6.设定设备网络=>2.扫描一览表设定菜单
前五项根据设备提供的说明来进行相应的设置,(不清楚数值可咨询设备厂商)
如设备无其他特殊要求使用Poll方式即可。BitStrobe不填,单位是字节
偏移量如不需要填0。
图中所示代表输入输出各32位。

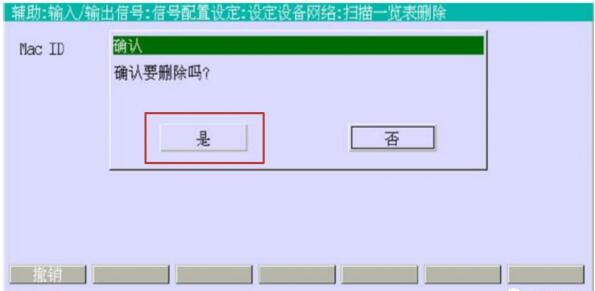
进入辅助=>6.输入/输出信号=>8.信号配置设定=>6.设定设备网络=>3.扫描一览表删除菜单中
将指定MAC_ID的从站的扫描列表数据清除并设置为零
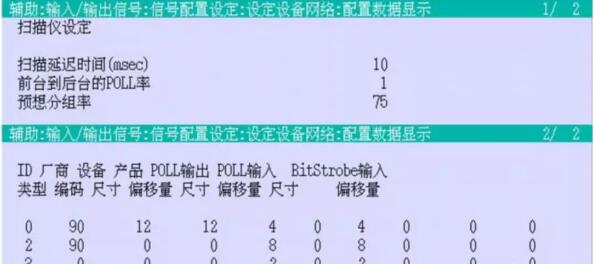
进入辅助=>6.输入/输出信号=>8.信号配置设定=>6.设定设备网络=>4.配置数据显示菜单
已配置好的数据显示:
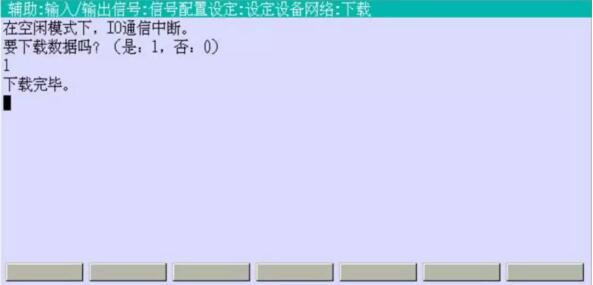
进入辅助=>6.输入/输出信号=>8.信号配置设定=>6.设定设备网络=>6.下载菜单
将配置数据下载到主板里面,输入1下载。
注意下载过程中一直通电。
进入辅助=>6.输入/输出信号=>8.信号配置设定=>6.设定设备网络=>6.下载菜单
将配置数据下载到主板里面,输入1下载。
注意下载过程中一直通电。
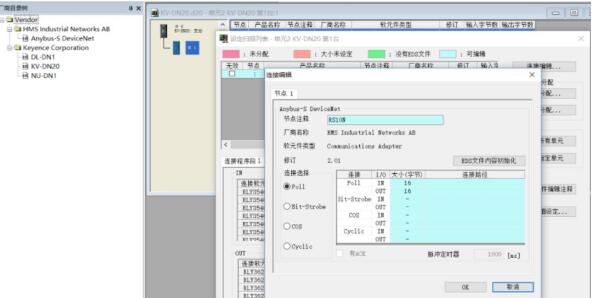
总线PLC端设定参考-DeviceNet设定(基恩士PLC)
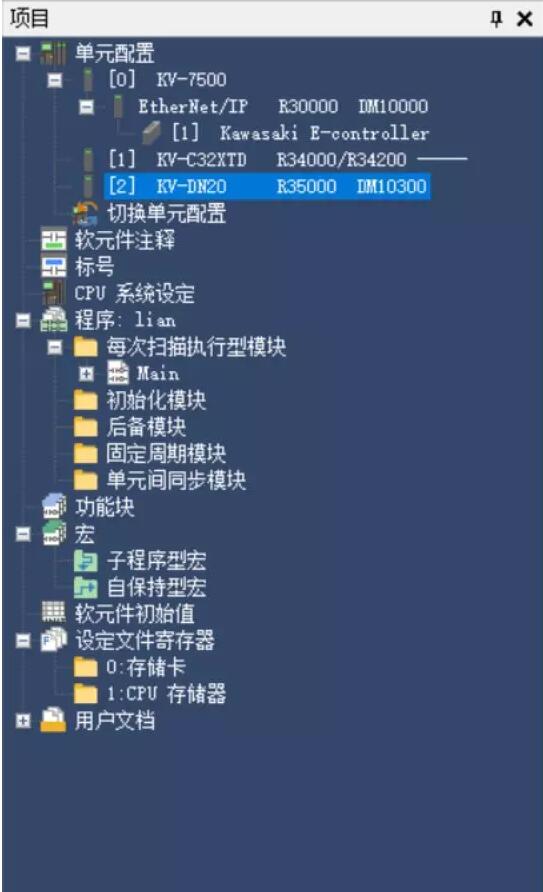
在工具-扩展单元设定菜单里选中KV-DN20设定

在菜单里选择KV-DN20菜单里配置eds文件Poll中设置字节大小
示例图中设置了128个点(16*8=128个点),并与之和机器人分配地址匹配
在菜单里选择KV-DN20菜单里配置eds文件Poll中设置字节大小
示例图中设置了128个点(16*8=128个点),并与之和机器人分配地址匹配
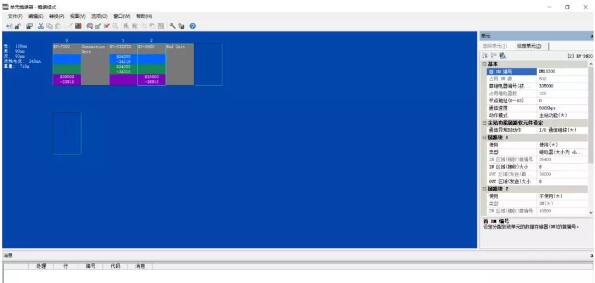
设置完成后点击设置模块打开单元监控器观察模块状态点击下方模块可观察IO状态,见下页。
图中点击绿色01可显示。
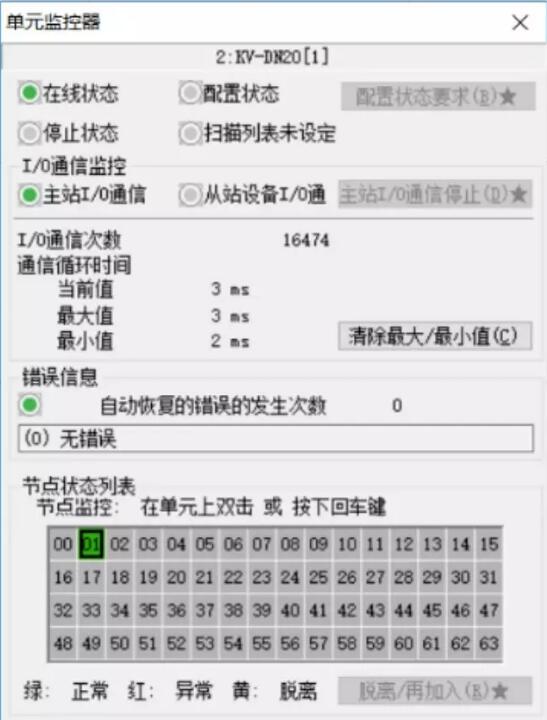

设置完成后点击设置模块打开单元监控器观察模块状态点击下方模块可观察IO状态,见下页。
图中点击绿色01可显示。

